

A4988 vs DRV8825 Stepper Motor Drivers: Complete Selection Guide (2026)
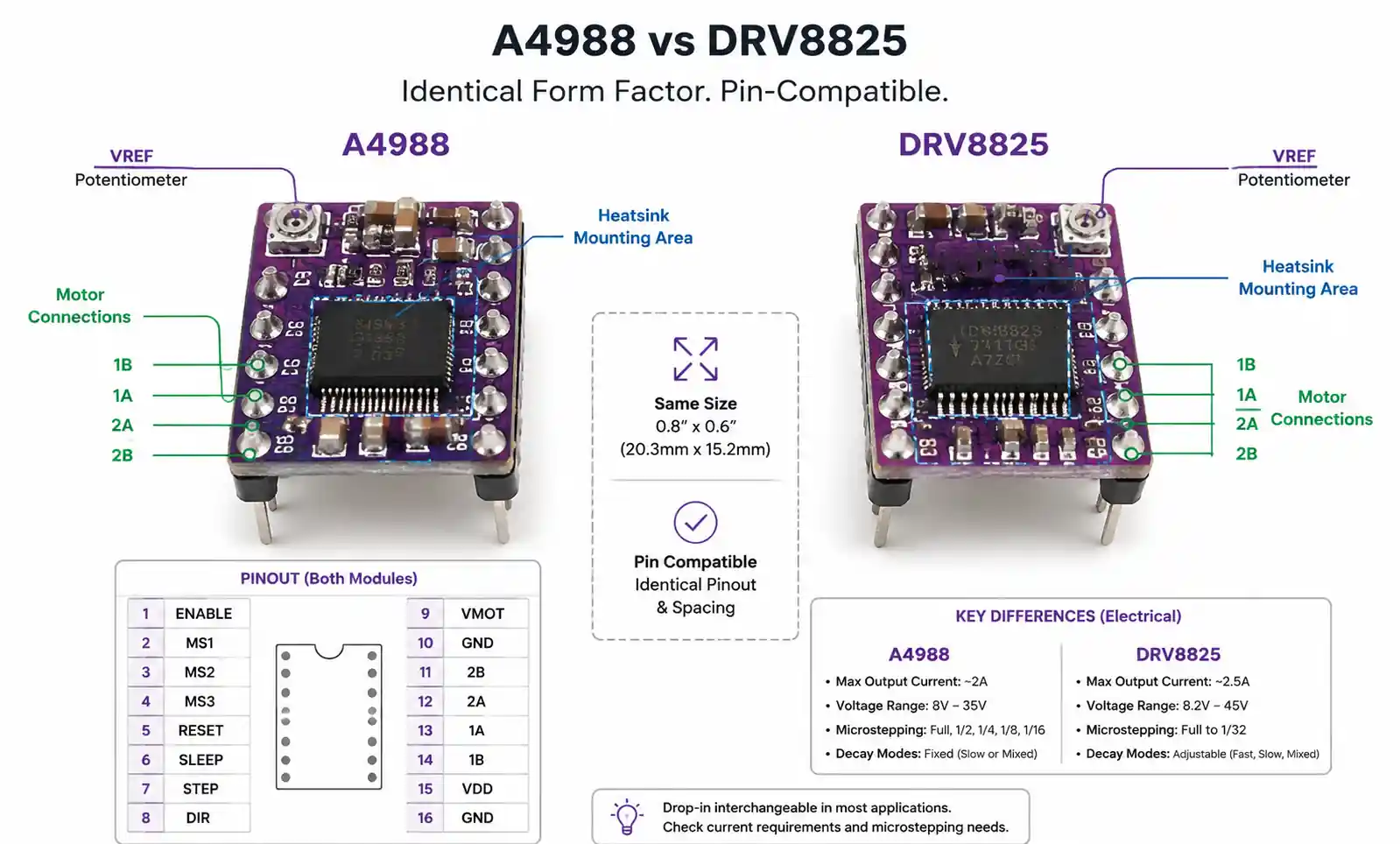
Choosing between A4988 and DRV8825 stepper motor drivers impacts torque delivery, thermal management, motion quality, and system cost. Both share the same footprint and pinout, but their electrical characteristics differ significantly—this guide helps you match driver capabilities to your motor and application requirements.
Table of Contents
- Key Technical Specifications Compared
- Performance Analysis: Current Handling and Thermal Management
- Microstepping Capabilities and Motion Quality
- Application Selection Guide
- Design Considerations and Common Mistakes
- FAQ
- Conclusion
1. Key Technical Specifications Compared
| Parameter | A4988 | DRV8825 | Practical Impact |
|---|---|---|---|
| Maximum Motor Voltage | 35V | 45V | DRV8825 supports higher voltage motors for increased torque |
| Continuous Current per Phase | 1A (no heatsink) | 1.5A (no heatsink) | DRV8825 drives larger motors without additional cooling |
| Peak Current per Phase | 2A | 2.2A | Both handle brief current spikes during acceleration |
| Maximum Microstepping | 1/16 step | 1/32 step | DRV8825 offers finer resolution for smoother motion |
| Minimum Step Pulse Width | 1 μs | 1.9 μs | A4988 responds faster to high-speed step signals |
| Logic Supply Voltage | 3-5.5V | 2.5-5.25V | Both compatible with 3.3V and 5V logic |
| Thermal Resistance (θJA) | 45°C/W | 28°C/W | DRV8825 dissipates heat more efficiently |
| Protection Features | Thermal, overcurrent | Thermal, overcurrent, UVLO | DRV8825 adds undervoltage lockout |
The DRV8825's higher voltage and current ratings suit larger NEMA 17 and NEMA 23 motors, while the A4988 remains cost-effective for smaller motors. The thermal resistance difference becomes critical in enclosed systems—the DRV8825's lower θJA allows higher currents without thermal shutdown.
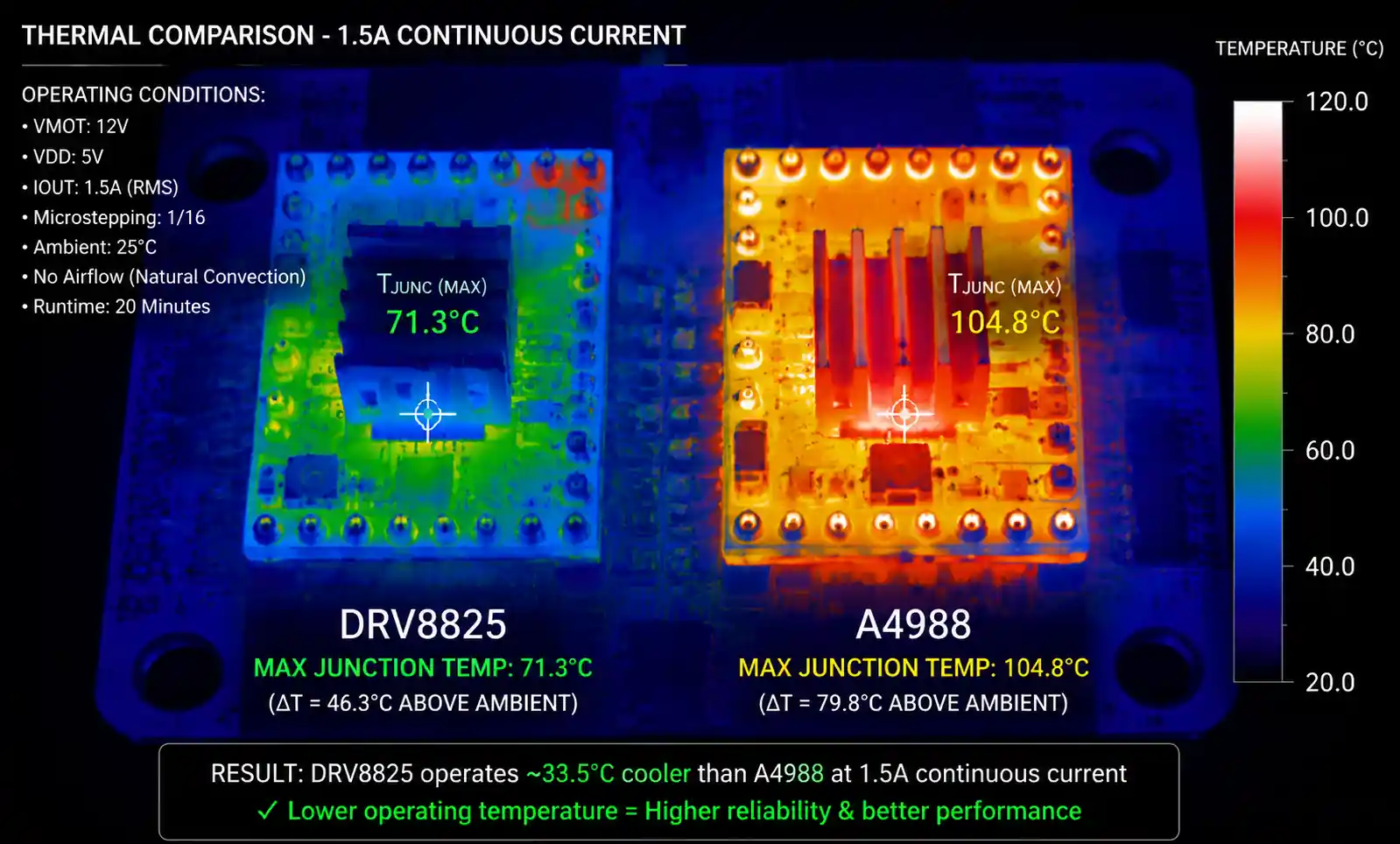
2. Performance: Current Handling and Thermal Management
Both drivers use chopper current regulation via VREF: I_limit = VREF / (8 × R_sense). With standard 0.1Ω sense resistors, VREF from 0.4V to 2.0V covers most small to medium stepper motors.
The A4988's 1A continuous rating limits motor selection to smaller NEMA 14 or low-current NEMA 17 motors. Exceeding this triggers thermal shutdown at ~150°C junction temperature. The DRV8825's 1.5A rating extends to standard NEMA 17 motors (1.2-1.5A per phase), common in 3D printers and small CNC applications.
Thermal Performance Comparison
| Operating Condition | A4988 Temp Rise | DRV8825 Temp Rise | Heatsink Requirement |
|---|---|---|---|
| 0.5A, 24V, 25°C ambient | ~20°C | ~12°C | None |
| 1.0A, 24V, 25°C ambient | ~60°C | ~35°C | Recommended for A4988 |
| 1.5A, 24V, 25°C ambient | Shutdown risk | ~55°C | Recommended for DRV8825 |
| 2.0A, 24V, 25°C ambient | Not safe | ~85°C | Required for DRV8825 |
Mounting a heatsink reduces junction temperature by 20-30°C, extending safe current by ~30%. Above 1.2A continuous, forced air cooling becomes necessary regardless of driver choice. The DRV8825's lower RDS(on) (0.38Ω vs 0.5Ω) directly reduces I²R losses, generating less heat per ampere delivered.
3. Microstepping Capabilities and Motion Quality
The A4988 offers five settings (full through 1/16), while the DRV8825 provides six (through 1/32). For a 200-step motor, the A4988 achieves 3200 steps/revolution versus 6400 for the DRV8825.
Beyond 1/16 microstepping, positional accuracy improvement becomes marginal due to motor detent torque and current regulation limitations. The DRV8825's 1/32 mode is most valuable for reducing mid-range resonance and audible noise rather than true 6400-position resolution.
At low speeds (<500 steps/sec), higher microstepping reduces vibration—visible in print quality or surface finish. At high speeds (>5000 steps/sec), microstepping benefits diminish and performance depends more on motor selection and acceleration tuning.
The DRV8825's finer microstepping reduces torque ripple from 5-8% (A4988 at 1/16) to 3-5%. For constant-velocity applications like camera sliders or dispensing systems, this difference is measurable and affects output quality.
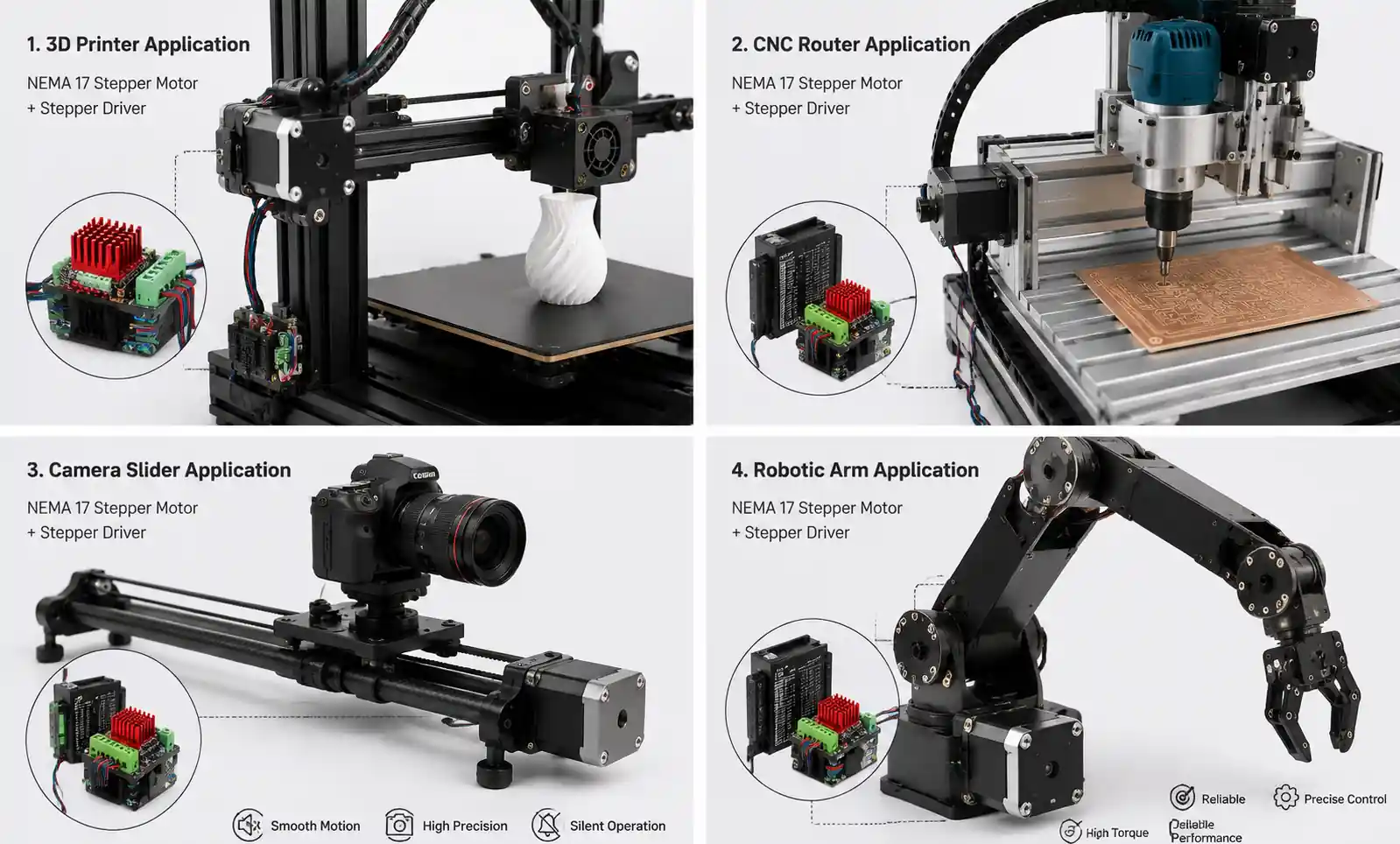
4. Application Selection Guide
| Application | Motor Size | Recommended Driver | Key Reason |
|---|---|---|---|
| 3D Printer (Standard) | NEMA 17, 1.2-1.5A | DRV8825 | Current capacity, 1/32 mode reduces artifacts |
| 3D Printer (Budget) | NEMA 17, 0.8-1.0A | A4988 | Lower cost, sufficient current |
| CNC Router (Small) | NEMA 23, 1.5-2.0A | DRV8825 w/heatsink | Higher current/voltage, thermal performance |
| Camera Slider | NEMA 14/17 | DRV8825 | Smoother motion from 1/32 microstepping |
| Laser Engraver | NEMA 17, 1.0-1.2A | Either | Choose based on speed requirements |
| Robotic Arm Joint | NEMA 17, 1.0-1.5A | DRV8825 | Higher resolution for smooth angular motion |
| Pick-and-Place | NEMA 17, 1.2A | A4988 | Faster step response for rapid acceleration |
Choose A4988 when: Motor current ≤1A, budget is primary, step pulses >150 kHz, or rapid start-stop motion dominates.
Choose DRV8825 when: Motor current >1A, supply voltage approaches 30V, motion smoothness is critical, ambient temperatures exceed 35°C, or maximum microstepping resolution is needed.
5. Design Considerations and Common Mistakes
Power Supply: Include bulk capacitance—minimum 100μF electrolytic + 0.1μF ceramic per driver. Insufficient capacitance causes voltage spikes that can exceed the A4988's 35V limit. For multiple drivers, calculate peak draw: N_drivers × I_max × 1.4, with 20% margin.
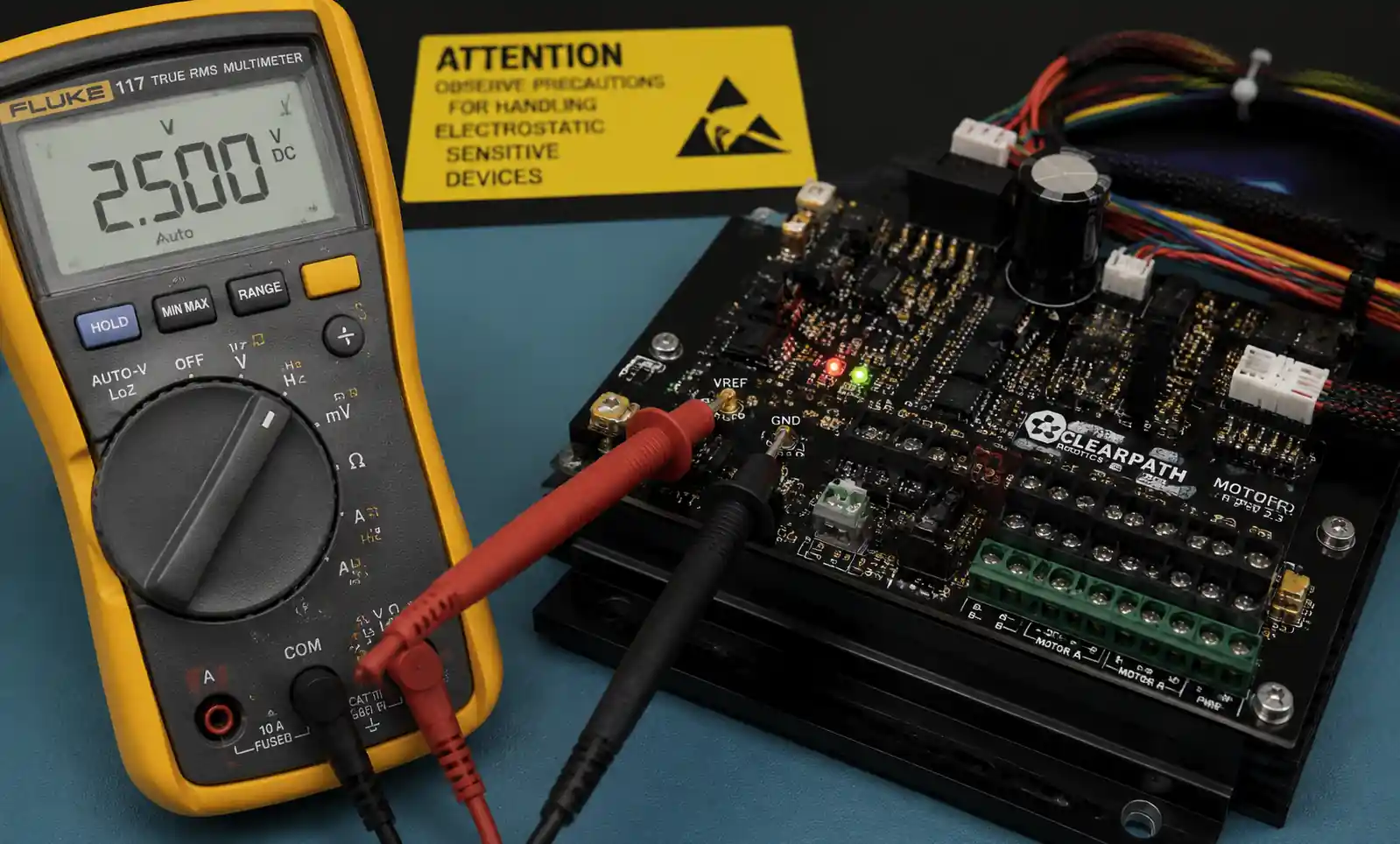
VREF Setting: Measure with driver powered but no motor connected. Calculate: VREF = I_desired × 8 × R_sense. For R_sense = 0.1Ω and I_desired = 1A: VREF = 0.8V. For RMS current (sinusoidal chopping), multiply by 0.7 to set RMS to 70% of peak rating.
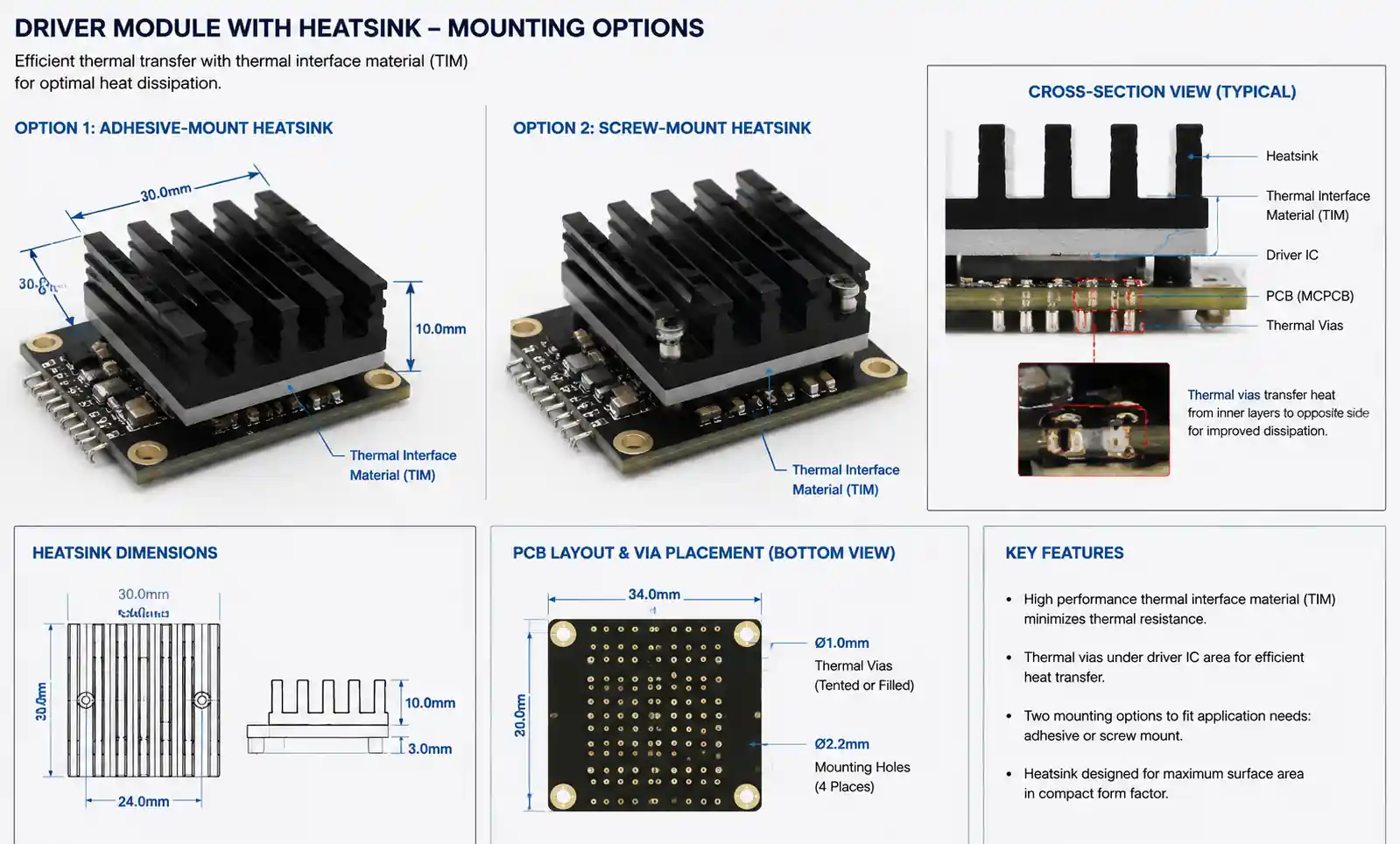
PCB Layout: The exposed thermal pad must be soldered to a ground plane with multiple thermal vias (minimum 4, 0.3mm diameter). Without proper vias, heat can't escape, reducing current capability by 30-40%. Above 1.2A, add a heatsink (10-15°C/W).
Common Mistakes to Avoid
| Mistake | Consequence | Prevention |
|---|---|---|
| Connecting/disconnecting motor while powered | Driver damage | Always power down first |
| Insufficient decoupling | Voltage spikes exceed ratings | 100μF + 0.1μF per driver |
| Current set too high | Motor overheating | Set to 70-80% of motor rating |
| Missing heatsink at high current | Thermal shutdown | Add heatsink above 1A continuous |
| No voltage margin on VMOT | Voltage sag during motion | Maintain 2V above motor rating |
| Enable pin floating | Unpredictable behavior | Pull ENABLE high or low explicitly |
6. Frequently Asked Questions
Can I replace A4988 with DRV8825 without circuit changes?
Yes, same pinout and footprint. Adjust VREF and verify your supply voltage doesn't exceed 35V. Microstepping configuration differs—the DRV8825 uses MODE2 pins for 1/32 mode.
What causes resonance vibration?
Stepper motors have natural resonances (typically 100-300 Hz) where torque drops and vibration increases. Higher microstepping shifts operation away from resonance points. The DRV8825's 1/32 mode provides more tuning options.
How do I calculate maximum speed?
Max_RPM ≈ (V_supply × 60) / (8 × L × I × steps_per_rev × microstep_factor). For a NEMA 17 (3mH, 1.2A) at 24V with 1/16 microstepping: ≈156 RPM. Higher voltage (DRV8825's 45V) increases maximum speed.
Do these work with unipolar motors?
Both are designed for bipolar motors only. Unipolar motors can be used in bipolar mode by leaving center taps disconnected, but torque is reduced ~30%.
Why does the driver get hot at standstill?
Stepper drivers maintain holding current (equal to configured maximum) to prevent shaft rotation. At 1A, expect 0.8-1.2W continuous dissipation. For long idle periods, reduce current via controller or disable with ENABLE.
What's the practical difference between 1/16 and 1/32?
Positioning accuracy difference is minimal—both exceed mechanical system resolution. 1/32 primarily reduces audible noise and provides smoother motion in 3D printing or camera movements. Torque is 5-10% lower at 1/32. Choose 1/32 for noise and motion quality, not positioning accuracy.
Can I parallel drivers for more current?
No. Independent current sensing interferes. For >2A motors, use higher-current drivers (TB6600, DM542) supporting 4-8A per phase.
7. conclusion
Choose A4988 when: Motors rated ≤1A, moderate duty cycles, cost-sensitive designs, or step frequencies approach 200 kHz.
Choose DRV8825 when: Motors rated >1A, elevated ambient temperatures, or smoothest motion with minimal acoustic noise required. Its 45V rating provides headroom for larger motors or voltage-boosting to increase high-speed torque.
Before finalizing: verify motor's rated current per phase (choose driver delivering 120% with adequate cooling), supply voltage (stay within limits), and microstepping requirements (match your positioning accuracy and noise specs). For prototypes, testing both drivers with your specific motor and mechanical system reveals performance differences most clearly.